記事検索
カテゴリー
最新NEWS
アーカイブ
2013.05.29
商品
新モバイルサーベイシステム
IP-S2 Standard+
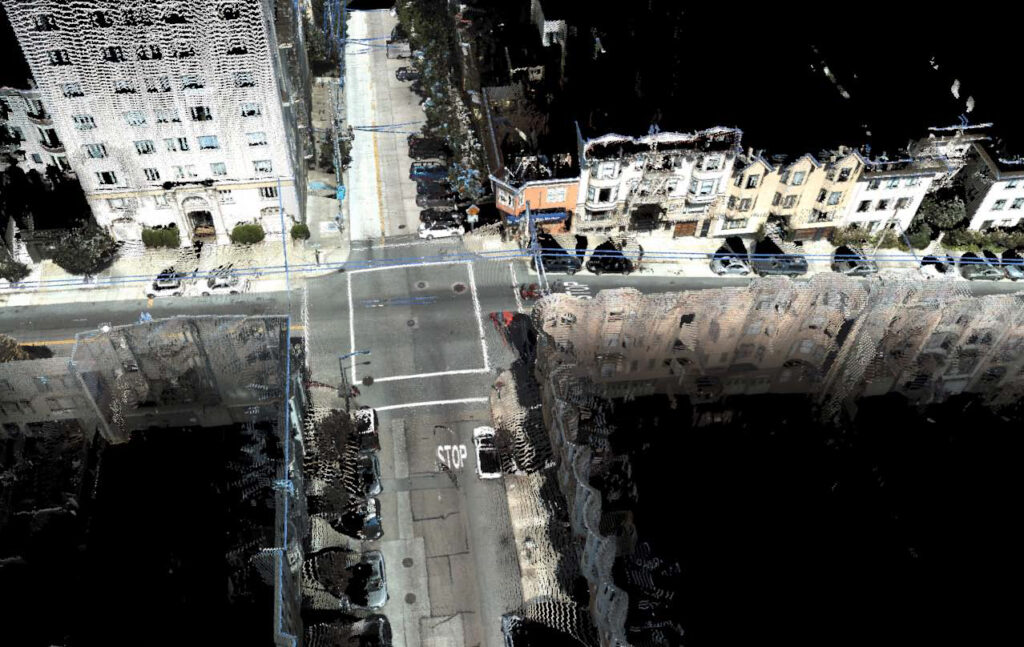
2周波GNSS受信機によって確立された位置座標と高精度IMUから得られる車両方位データおよびホイールエンコーダーからの走行データの3つのデータを統合し、高精度な車両位置を求めます。360°全周囲のデータ取得のために標準で3台のスキャナーを最適に構成、オプションで5台まで増設すれば150,000点/秒まで点群密度を高めることが可能。
操作性に優れたデータ収集ソフトに加え、パワフルな後処理ソフトを標準同梱。位置データ、基準点データおよび色情報付きの点群データを簡単に素早く作成出来ますので、道路空間管理など3Dモデルを成果とする業務を高い生産性で支援致します。

- 高精度IMU搭載
- 最大5台スキャナーによる高密度な点群データ
(150,000点/秒) - 広範囲な点群データ計測

レーザースキャナー
- 高解像度・高密度3D点群データ取得
- 3台スキャナータイプまたは5台スキャナータイプが選択可能
- 高精度な新型スキャナー搭載

IMUユニット
- 高精度IMUユニット(1°/時)をBOX内に搭載

GNSSアンテナ
- 常に正確な車両位置を算出
- 2周波GNSSボード内蔵
ホイールエンコーダー
- 更なる精度と信頼性向上を図るホイールエンコーダ
- ホイールの回転を検知
- 回転速度との差異を常に比較

画像ユニット
- 360°全周囲画像
- 一定の距離または時間間隔による全周囲画像データの取得が可能

簡単セットアップ
全てのセンサーは一体のコンポーネントとしてキャリブレーションが完了しておりますので、車両取付が完了次第、直ぐに利用可能です。
IP-S2 STANDARD+ PROJECT WORKFLOW
